An old, retired machinist went back to his former place of work many years later to take a tour of the plant. The tour guide had each participant give a brief introduction and was delighted to learn the old man was a former employee. The guide took great pride in showing the new state-of-the-art computer-driven machines. Part of the description was the amazing tolerance they were able to achieve.
“This machine is accurate to a tolerance of one, one-hundred-thousandth of an inch,” the guide stated proudly. “Bet you didn’t hold tolerances to that level back in your day?” he asked the old man.
“No,” said the old machinist, “we didn’t have those kind of tolerances. We just made parts that fit exactly.”
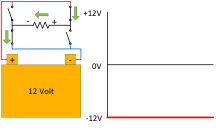
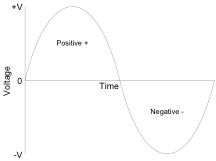
The world of electronics prior to the digital revolution was an analog world. Control and feedback voltages had an infinite number of values, and the system came into the desired setpoint exactly. Waveforms were smooth and variables were infinitely variable.
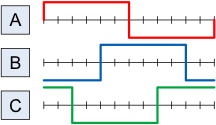
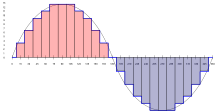
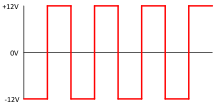
I’ll jump over the 4-bit digital beginnings and jump right in at 8 bits. Eight bits of binary looks like 01100011. The lowest value is 00000000 (0 decimal) and the highest is 11111111 (255 decimal); that’s 256 different values. It also looks like 256 steps. Each step is 1 / 256 away from the next.
For example if 11111111 (255) is 5 volts maximum and 00000000 (0) is 0 volts, then we have 0.01953125 volts per step. That can also be viewed as 0.390625% per step.
A setpoint can be 01111110, (126), 2.4609375 volts or 01111111, (127), 2.48046875 volts, but NOT 2.475 volts.
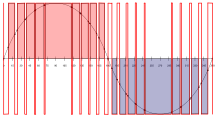
Everything becomes jittery. Yes, you can increase the bit count 16, 32, 64, etc., which reduces the error, but you still have to rely on alternating between a bit too low and a bit too high. Nothing fits exactly.
The good news is that the digital revolution brought computers and programming. Now, instead of making a machine that only does one thing, the programming can be modified to change the process without redesigning and building a new machine.
An update of software can eliminate old problems, add new algorithms and give new life to an old design. This is marvelous. It is like liquid electronics. No need to create a new circuit board, just change how it processes inputs and scales outputs.
Forget changing resistors to set the gain of amplifiers, program a new gain. Wow, this digital stuff is great! We can make the changes on a computer, plug in a cable and update the old design with a new one. What time we can save!
What did you say about jitter? I didn’t notice any jitter.